

1 M1M3 - analyze position and rotation stability throughout a tracking period#
Note
This technote is a work-in-progress.
1.1 Abstract#
This technical note describes the analysis and results of the positional and rotational stability of M1M3 through the tracking periods. The notebook is located within the notebooks_vandv GitHub repository, SITCOM-1136_M1M3_analysis_stability_tracking, and the associated ticket SITCOM-1136.
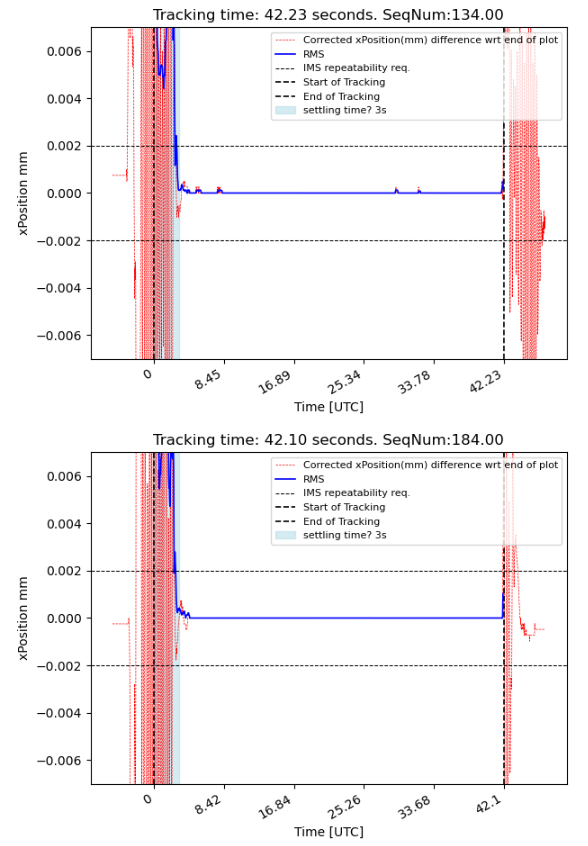
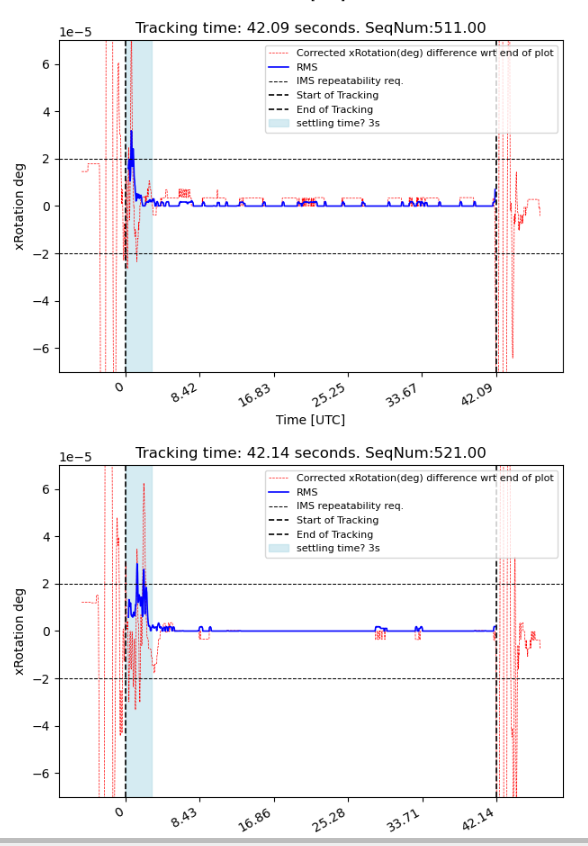
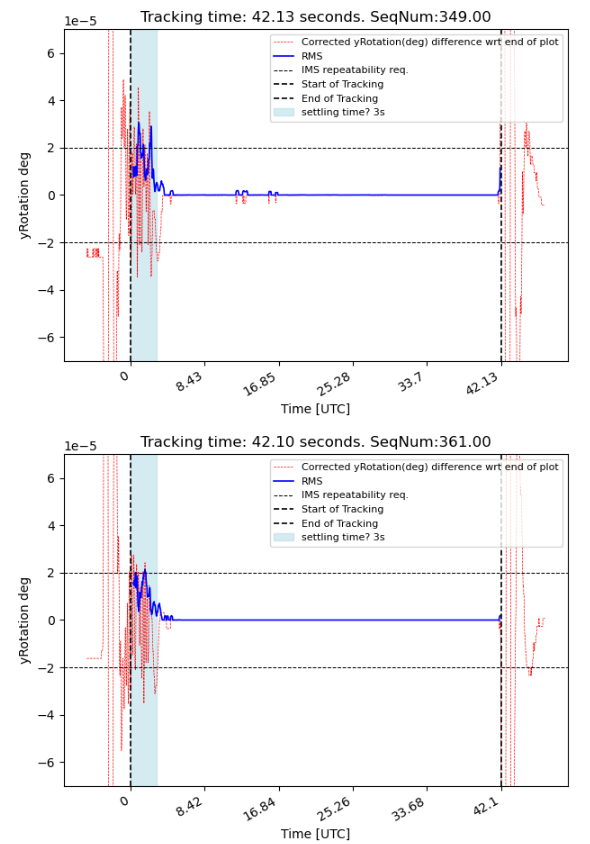
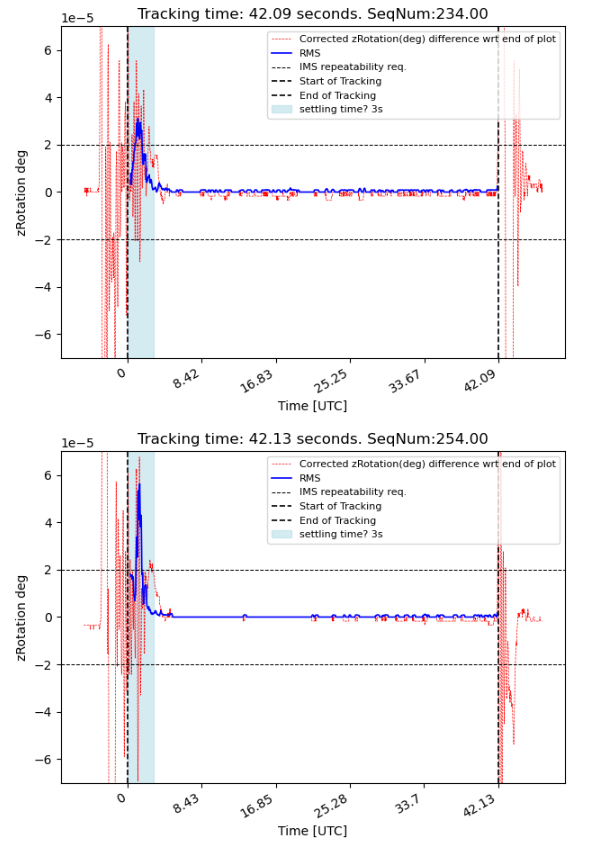
We analyzed displacements of M1M3 for X, Y, Z, RX, RY, and RZ during the period between slews while tracking (innitially we have been told that the tracking period is 30 s) and check if they comply with the 2 micron and 2e-5 degree requirement.
The results show that during tracking the requirements were satisfied. Only a few cases were not satisfied and it was always in the first seconds of the tracking. The detailed study of the stability in the first seconds of tracking does not belong to this ticket.
Before starting the analysis, we had been told that the duration of the tracking was 30 seconds. However, after analyzing all the tracking for two nights, the duration is 42 s.
The data comes from the EFD (Engineering and Facility Database): imsData. The IMS is the Independent Measurement System, a set of electronic micrometers that measure the displacement of the M1M3 mirror with respect to the cell.
1.2 Description#
We have analyzed the vibrations of M1M3 using EFD data for the 6 possible motions (Position: X, Y and Z and Rotation: X, Y, Z) during the tracking period. We have first analyzed each of the motions individually (xPosition, yPosition, zPosition, xRotation, yRotation, zRotation) and then we have analyzed them as a whole.
We have analyzed all the tracking for the nights 20-12-2023 and 22-12-2023.
1.3 Analysis of M1M3 during tracking#
1.3.1 Requirement verified#
req_rms_position = 2e-3 ## mm, tolerance from repeatability requirement for IMS positional
req_rms_rotation = 2e-5 ## degrees, tolerance from repeatability requirement for IMS rotational
1.3.2 Test Data#
day Obs = 2023-12-20
day Obs = 2023-12-22
The events have been selected from block 146 in compliance:
- type == TMAState.TRACKING
- endReason == TMAState.SLEWING
We have eliminated from the analysis those tracking whose time was less than 2 seconds. These trackings are considered errors. In any case, there were no more than three cases per night.
The RMS was calculated with a rolling window of 10 (a 50 rolling window is approximately 1 second of movement). To avoid errors in the RMS when introducing data from the slew (the movement before and after the tracking), we performed the analysis starting 0.1 seconds after the beginning and ending 0.1 seconds before the end
1.3.3 Results#
Column |
dayObs = 20231220 |
dayObs = 20231222 |
|---|---|---|
XPos |
33 |
26 |
YPos |
0 |
1 |
ZPos |
0 |
0 |
XRot |
19 |
13 |
YRot |
22 |
22 |
ZRot |
26 |
32 |
All |
34 |
37 |
NOTE: The column all means that we have analysed all 6 positions at the same time and in at least one of them we have exceeded the required RMS.
On the night of 12/20/2023 we analyzed 226 trackings and found instability in the first 3 seconds in 34 of them, i.e. 15%. On the night of 12/22/2023 we analyzed 326 trackings and found instability in the first 3 seconds in 37 of them, i.e. 11%.
1.3.4 Examples#
1.4 Analysis tracking time#
When analyzing all the follow-ups of the two nights, we observed that the duration was not 30 seconds, as expected, but 42 seconds.
Here we include a quick analysis to verify that it really was 42 seconds and whose analysis in detail does not correspond to this ticket.
Number of trackings: 226
Mean duration of tracking: 53.157
Median duration of tracking: 42.112
Mode of tracking duration (rounded): 42
Standard deviation of tracking duration: 98.321
Variance of tracking duration: 9666.966
Maximum duration of tracking: 929.556
Minimum duration of tracking: 0.397
These values appear because in each night there are 2 or 3 tracking with a duration of less than 2 seconds and about 5 tracking with a longer duration (some up to 15 minutes).
1.5 Conclusion#
After analyzing all the two-night tracking we have seen that the mirror remains stable during the entire follow-up in more than 85% of the cases.
Only those cases where the RMS is higher than required, this occurs in the first 3 seconds of the tracking. The setteling time during tracking is something that is being analyzed in another ticket.
In addition, we saw that the time duration of the tracking is 42 seconds and not 30 seconds as initially indicated.